

Project Description
Motivation
In the event of a Mass Casualty Incident (MCI), such as a railroad accident or far-reaching natural disasters, often more medical resources are required than are immediately available on site. Before patients can be treated and transported to the hospital, they are divided into categories according to the severity of their injuries. Due to a lack of routine as well as high stress and emotional strain, the so-called triage is a high challenge for the emergency services. Technical systems can support the emergency physicians in their work to ensure an optimal patient care process.
Goals and procedure
In the FALKE project, a system for a partially automated search and triage of injured victims at the scene of an incident is to be researched. For this purpose, a contactless vital parameter detection system will be developed. This will be realized by combining video, thermal image and radar sensors. These sensors will be mounted on an Unmanned Aerial System (UAS). In this way it is possible to automatically detect injured persons even before the arrival of the rescue services. The triage of the patients is checked and if necessary corrected by a leading emergency physician using a telemedical connection via a secured data line. For the operation beyond visual line of sight of the UAS, the technical requirements are realized and the legal framework is developed together with the German Air Traffic Control (Deutsche Flugsicherung, DFS).

UAS image of the treatment of injured persons during a simulated accident
Innovations and perspectives
The FALKE system will make it possible to send a UAS to the scene of an accident while the emergency services are being alerted and dispatched. This means that in the case of a MCI, the searching and triaging of injured persons can begin before the rescue services arrive.
The Scenario
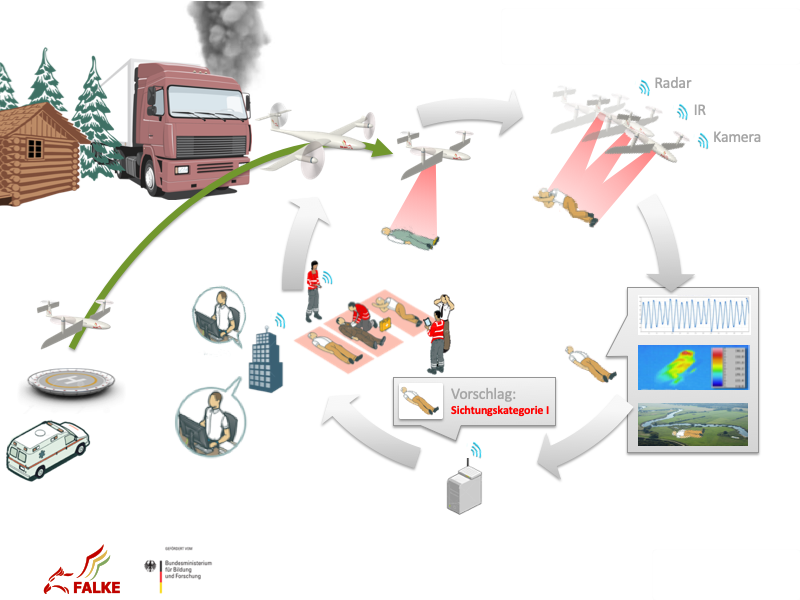
The use of FALKE in a MCI (identification of injured persons, contactless vital parameter detection, data fusion and partially automated triage, Tele-LNA connection)
The Flight-System
- Full integration of the UAS into civil airspace
- Collision avoidance on the basis of information by a superordinate air traffic management (DFS)
- Implementation of the payload interfaces to the on-board data networks
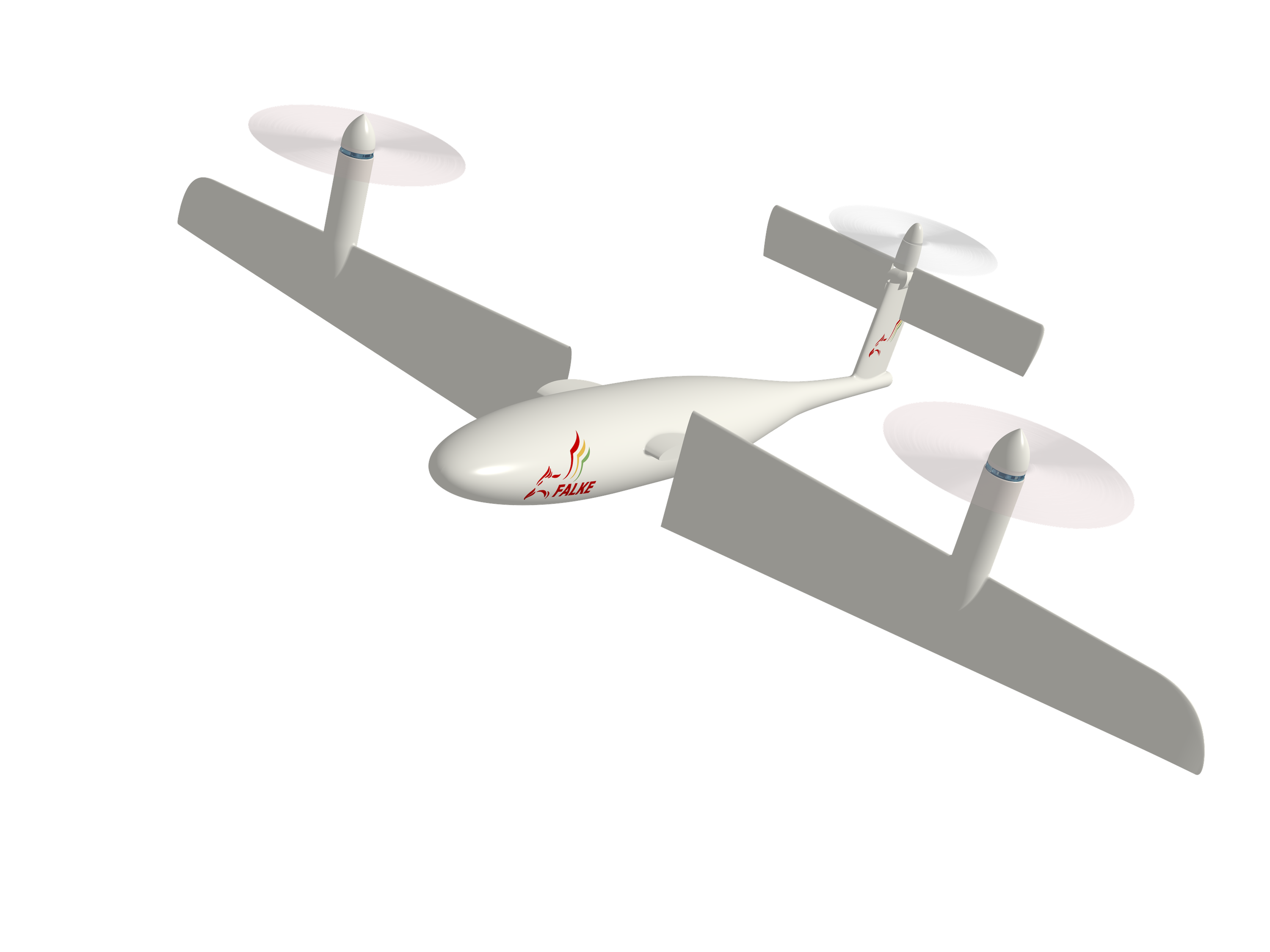
- Continuous transition from hovering flight to fast flight with speeds from 0 to 100 km/h
- Mechanical and electrical integration of the sensors (radar, IRT and RGB camera) and the control unit and communication platform
- Adaptive flight guidance with dynamic path planning for (partially) automated patient triage
- Reliable, redundant communication link between UAS and FALKE control center





